机器人概念已经火了好多年了,目前确实有不少公司已经研制出了性能非常优越的机器人产品,我们比较熟悉的可能就是之前谷歌的“大狗”和会空翻的机器人了,这些机器人动作那么敏捷,背后到底隐藏了什么高科技呢,控制技术太过复杂,我就不了解了,不过其中的机械原理其实相对比较简单,大部分都是一些连杆机构。下面我们就看看一般都有什么连杆机构适于用于行走的。
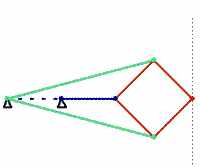
1.平行四杆机构


怎么最后快变成车轮子了!
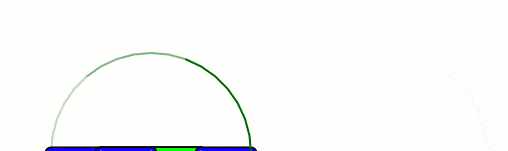
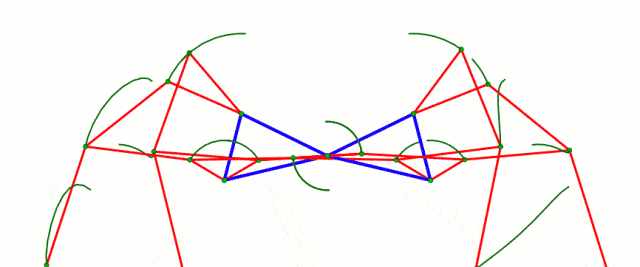
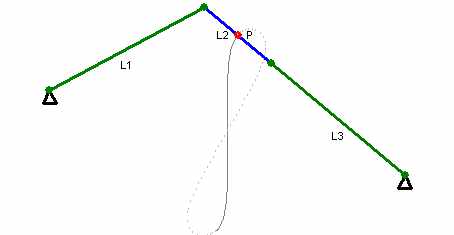
2.切比雪夫连杆机构经常被用于模拟机器人的行走。
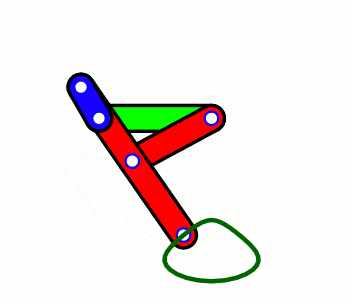

这步态够优美吧,迈着小碎步就出来了。

这个竟然也是切比雪夫连杆组成的,我怎么没看出来,什么,倒立着就出来了,倒立着好像也挺好看的啊

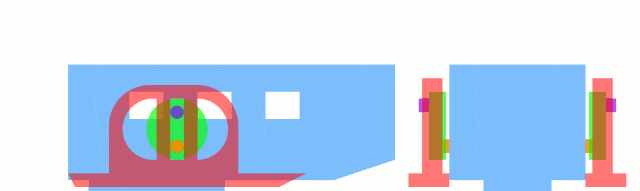
3. 克兰连杆机构
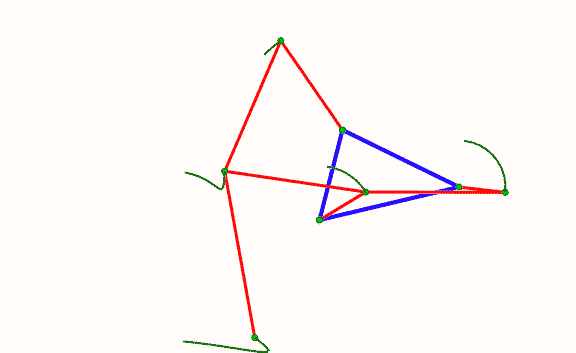
单个克兰连杆是酱紫的。
你这步子迈得有点不美丽了啊,不过还是克兰连杆。
没看错吧,横着就出来了,我想静静!对还是切比雪夫好听好看!
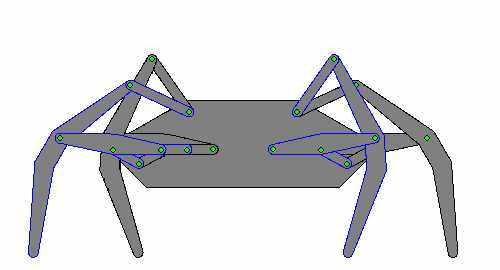
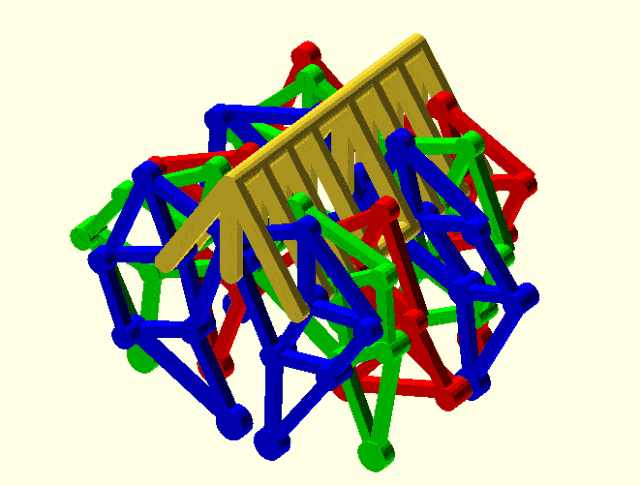
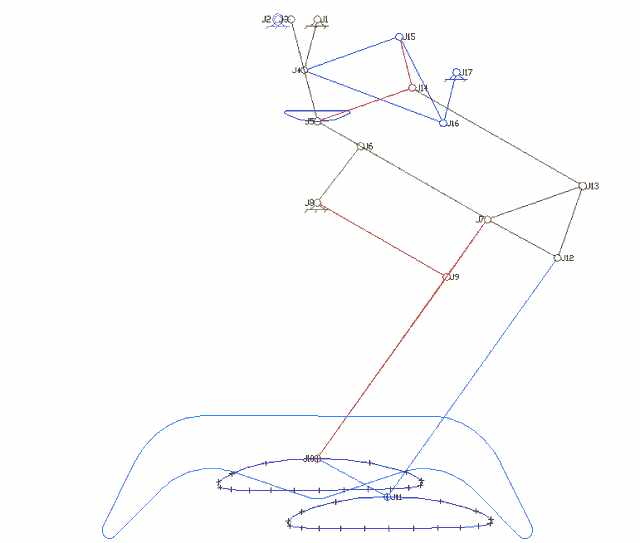
4. Jansen 连杆机构
是由Jansen发明的,用于模拟平稳行走,Jansen利用这种连杆制造了著名的海滩巨兽,这种连杆兼具美学价值和技术优势,通过简单的旋转输入就可模仿生物行走运动,这种连杆已经用于行走机器人和步态分析。
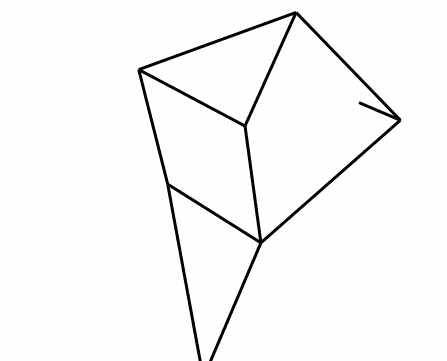
单个Jansen连杆机构是酱紫的
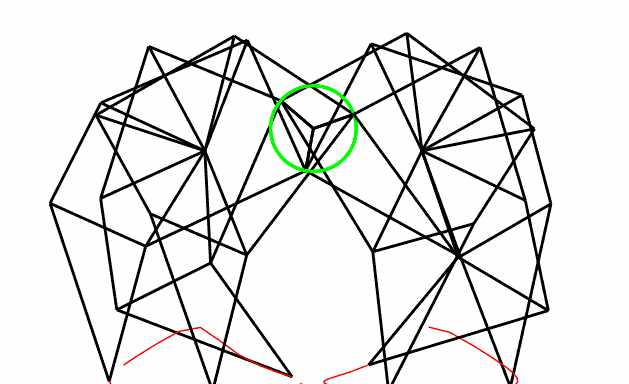
你那么厉害,我不信12只脚你还不晕!
5.波塞利连杆机构
波塞利连杆是第一个真正把旋转运动转化为绝对直线运动的平面连杆机构,
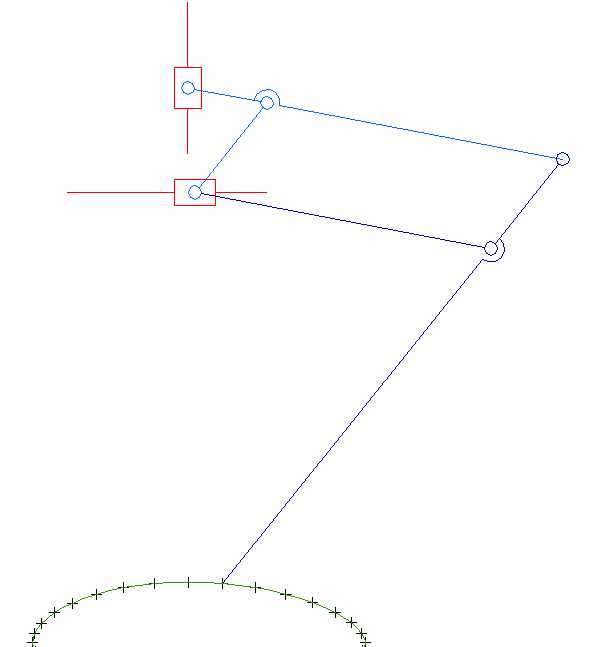
6.瓦特连杆,瓦特连杆是由瓦特发明的,没错就是那个特别流弊改良了蒸汽机的瓦特。在瓦特连杆中,移动的中点自由度被限制,只得做近似直线运动。最早是用在瓦特蒸汽轮机上的,后来也用做汽车的悬架结构中了。
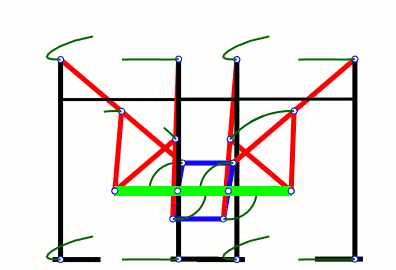
6.其他模仿行走的机构
这个有点复杂啊!

这个大长腿有点不一样啊,输入竟然不是旋转运动,直接用直线运动控制了
1.《机器人行走背后的机械原理-几种著名的连杆机构》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《机器人行走背后的机械原理-几种著名的连杆机构》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/fangchan/27527.html