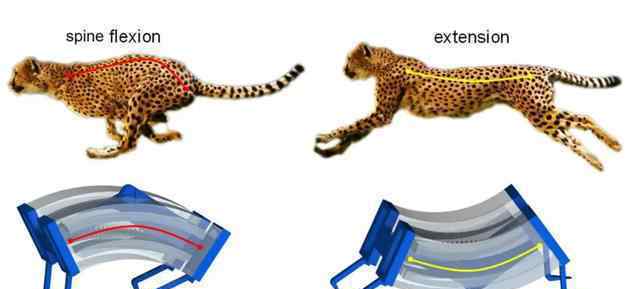
猎豹是陆地上跑得最快的动物。它们通过背部强壮的肌肉控制脊柱的弯曲和拉伸,从而达到高速奔跑,追逐糖浆或其他猎物。受猎豹的启发,在《科学进步》杂志上发表的一篇论文中,研究小组开发了一种新型软机器人。与前代相比,这种新型软机器人跑得更快,抓物体更熟练。
 两个执行器中交替抽气,让“小猎豹”的“控制脊柱的肌肉”在收缩和伸长的两种状态下交替变换。两个执行器交替抽气,让“小猎豹”控制脊柱的肌肉在收缩和伸长两种状态下交替变化。
两个执行器中交替抽气,让“小猎豹”的“控制脊柱的肌肉”在收缩和伸长的两种状态下交替变换。两个执行器交替抽气,让“小猎豹”控制脊柱的肌肉在收缩和伸长两种状态下交替变化。
这些“小猎豹”软式机器人长约7厘米,重约45克。它们由两个软气动执行器和一个由弹性弹簧驱动的机械脊柱组成,具有“双稳态”脊柱结构。猎豹机器人跑步时,身体会在背部弯曲四肢收缩的蹬车状态和背部伸展四肢伸展的拉伸空状态之间变化。当蹬踏或拉伸空达到极限时,气动执行器和弹簧的能量之和处于最低点,因此称为“双稳态”。机器人内部的两个执行器模拟脊柱,充气时可以分别上下弯曲。空气泵交替弹开,实现机器人前弓着地和后弓跳跃之间的形态转换空。这种设计赋予了机器人“在地面上推动”和在地面上跳跃的能力。
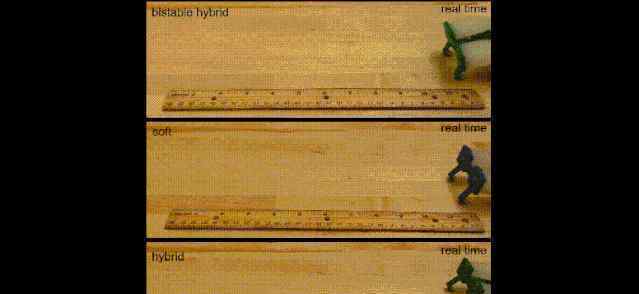 “小猎豹”能够蹬地并跃进,这使得它的速度比其他软体机器人快出很多。“小猎豹”能在地面上迈步向前跳跃,这使得它比其他软式机器人要快得多。
“小猎豹”能够蹬地并跃进,这使得它的速度比其他软体机器人快出很多。“小猎豹”能在地面上迈步向前跳跃,这使得它比其他软式机器人要快得多。
研究人员指出,在过去,软机器人只能在地上爬行,这限制了它们的速度。以前软机器人最快的速度是每秒移动0.8体长。新一代软机器人可以在3Hz左右的低驱动频率下达到每秒2.7个身长的速度——是以前最快速度的三倍多。
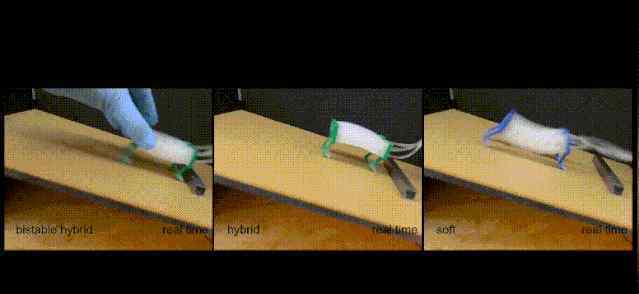 “小猎豹”在斜坡和水中的表现也比其他软体机器人好。“小猎豹”在斜坡和水面上的表现比其他软式机器人要好。
“小猎豹”在斜坡和水中的表现也比其他软体机器人好。“小猎豹”在斜坡和水面上的表现比其他软式机器人要好。
此外,这些新机器人甚至可以在陡坡上奔跑,在水中快速游泳。研究人员希望这些“小猎豹”将来可以帮助搜救,也可以用于工业生产。
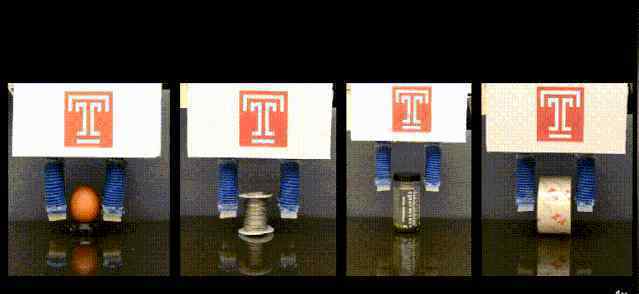 这种新型软体机器人还可以协同完成抓取作业。这种新型软机器人还可以配合完成抓取操作。
这种新型软体机器人还可以协同完成抓取作业。这种新型软机器人还可以配合完成抓取操作。
1.《“小猎豹”软体机器人:机器人内部的两个执行器模拟脊柱》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《“小猎豹”软体机器人:机器人内部的两个执行器模拟脊柱》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/fangchan/824539.html