关注我们,和自动化技术人员交朋友
简易机械手的可编程控制器控制
今天
什么是实际应用的小例子?
嗯...今天就来说说如何利用PLC实现简单的搬运动作,让机械为人服务!结合上一篇文章中的混音器例子,其实这两个例子和顺序控制指令完美搭配使用,在实际应用中非常方便,在程序循环控制中也得心应手!
废话
话不多说,进入我们今天的话题!

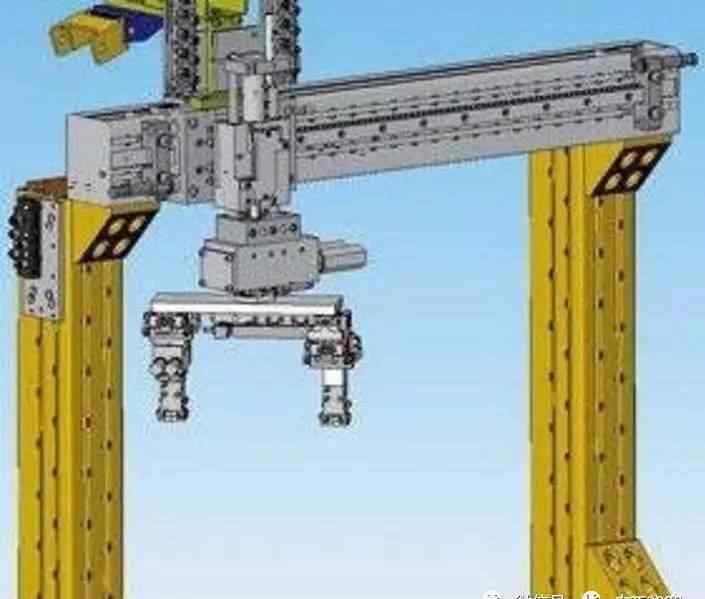
简单机械手的结构图如图所示。M1为控制机械手左右运动的电机,M2为控制机械手上下运动的电机,YV线圈用于控制机械手的夹紧和锁紧,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关,SQ5为工件检测开关。
简易机械手的控制要求如下:
机械手应将工件从工位a移至工位b;
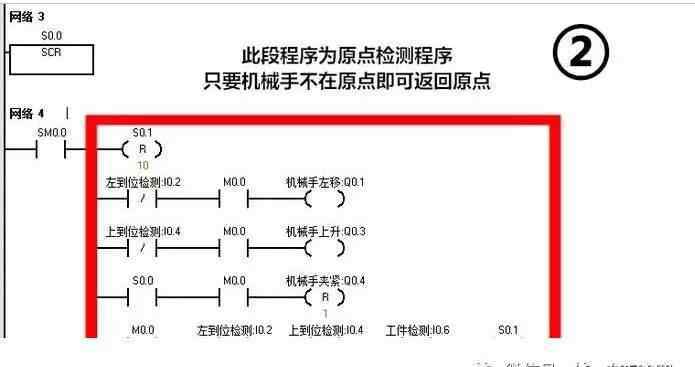
机械手的初始状态(原点条件)是机械手应停在工位A上方,SQ1和SQ3闭合;
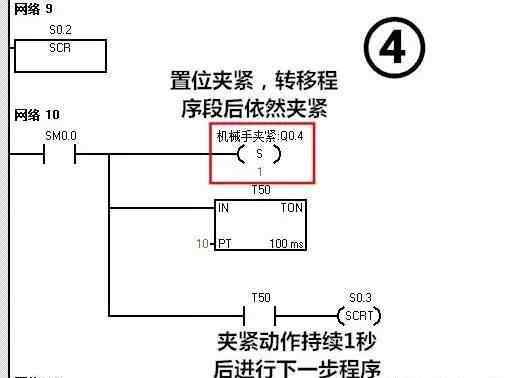
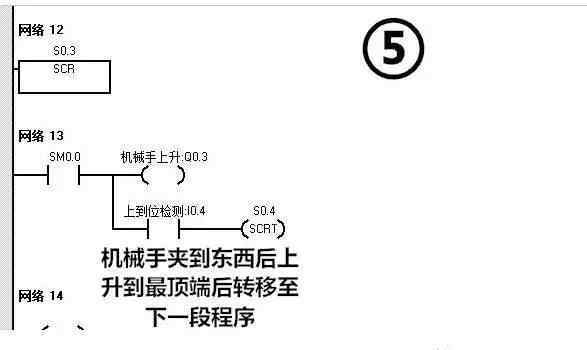
如果原点条件满足,SQ5闭合(工件A处有工件),按下启动按钮,机械手将按照“原点→下降→夹紧→上升→向右移动→下降→锁定→上升→向左移动→原点”的步骤工作。
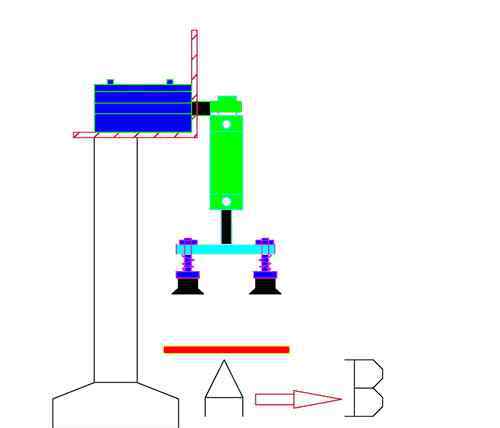
动作图
编程前如何传递矫直动作;

定义
符号表:

硬件
接线图:

满足
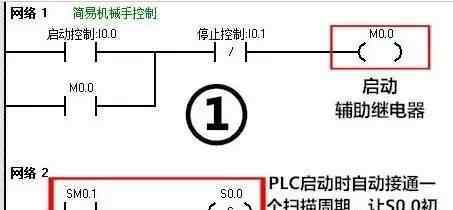
所有操作的程序如下:

很多梯形图眼花缭乱,不用担心分析这个机械手是怎么工作的!
其实结合前面的搅拌机看这个图就简单多了,没有那么多平行分支,所以转移的逻辑很简单!






中国. k【工控老马】——黑龙江省科学院自动化研究所培训中心首席讲师,中国. k控联创始人之一,神秘莫测,技术上不要和他比,谢谢。他只是一个教过很多学生的老师,就这么简单。重点:自动化相关教学软硬件研发,自动化复杂工程解决方案。

新浪微博:搜索关注工控老马

黑龙江省科学院自动化研究所培训中心
国内首个三维可编程逻辑控制器虚拟现实教学系统
该培训系统:PLC、机器人技术、运动控制集成在虚拟平台中。能够满足逻辑控制、过程控制和运动控制的学习要求。工业仿真系统能够满足智能设备和系统集成人才培养过程的要求。控制包括数字输入、数字输出、模拟输入、模拟输出、高速脉冲输出、高速计数、网络通信等。
电气自动化工程师优秀培训班:最晚开课时间:2017年7月15日,全日制班(全日制班)(30天),2017年8月26日,周末班(周六周日班)(10周)(2017新课程报名快;学生需要提前注册。招生对象:(大学生、社工)。讲师:(工控马劳)首席讲师,报名后提前一周报到,安装全套配置和编程软件系统,CAD,接收中心培训资料,填写认证表格。0451-83166633 www.hljpx.net
中国k联盟:从东北出发,我们是一直坚守东北这块土地的技术人员的平台
关注我微信号:chinak958888(←长按复制)更多信息,请关注微信号中国. k中国控制联盟,汇聚中国制造2025技术人员联盟
欢迎来到黑龙江自动化培训中心
自动化培训的国家领导者
1.《搬运机械手 西门子PLC应用实例:简易机械手的PLC控制》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《搬运机械手 西门子PLC应用实例:简易机械手的PLC控制》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/guoji/1233388.html