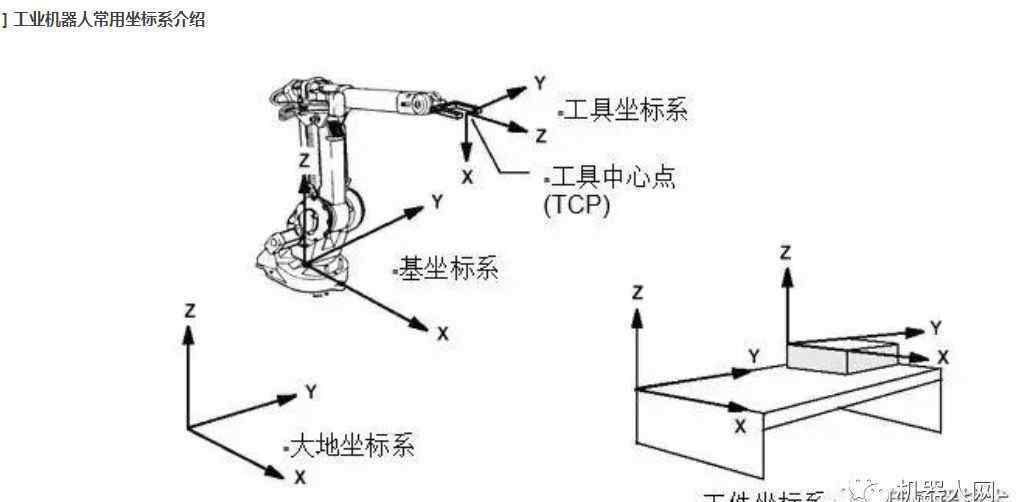
坐标系包括:
1.基本坐标系
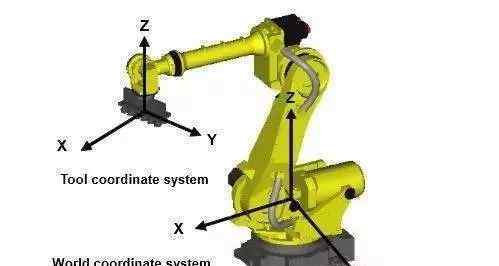
2.世界坐标系
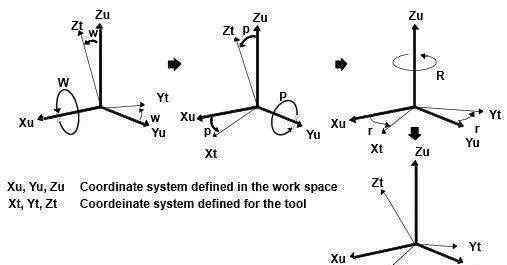
3.工具坐标系
4.工作对象坐标系
工业机器人的坐标形式包括直角坐标、圆柱坐标、球面坐标、关节坐标和平面关节。
1)笛卡尔坐标/笛卡尔坐标/台式(3P)这个机器人由三个线性关节组成,用于确定末端机械手的位置,通常还有附加的道德旋转关节来确定末端机械手的姿态。该机器人在X、Y、Z轴上的运动是独立的,运动方程可以独立处理,方程是线性的,易于计算机实现;两端都可以支撑。对于给定的结构长度,其刚度最高:精度和位置分辨率不随工作场所变化,容易达到高精度。但其作用范围小,武器收缩和伸展方向相反,妨碍其工作。而且占地面积大,移动速度慢,密封性能差。
2)圆柱坐标机器人(R3P)使用两个平面关节和一个旋转关节来确定部件的位置,然后添加一个旋转关节来确定部件的姿态。该机器人可以绕中心轴旋转一个角度,工作范围可以扩大,计算简单;直线部分可由液压驱动,可输出大功率;可以延伸到空腔机内。然而,它的手臂所能到达的空房间是有限的,它不能到达靠近柱子或靠近地面的空房间。线性驱动器难以密封和防尘。后臂工作时,臂的后端会碰到工作范围内的其他物体。
3)球坐标(2RP)16-球坐标机器人采用球坐标系统,用一个平面关节和两个旋转关节确定部件的位置,再用一个附加的旋转关节确定部件的姿态。这种机器人可以绕中心轴旋转,靠近中心支架的工作范围大。两个旋转驱动装置易于密封,覆盖工作空间大空。但坐标复杂,难以控制,直线驱动装置仍存在密封和死区问题。
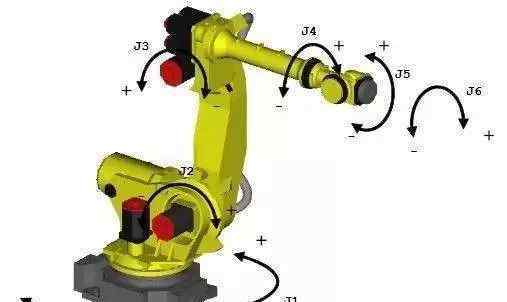
4)关节坐标/拟人(3R)关节机器人是工业机器人中最常见的结构,因为所有关节都是旋转的,类似于人类的手臂。
5)平面关节机器人可以看作关节坐标机器人的特例,只有平行的肩关节和肘关节,关节轴共面。
1.《坐标系有哪几种 机器人参数坐标系有哪些?各参数坐标系有何作用?》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《坐标系有哪几种 机器人参数坐标系有哪些?各参数坐标系有何作用?》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/jiaoyu/793647.html