2019上海数字期货

G9
无人机协同离散结构构建
自动无人机的离散元构造
导师:翔|世贤世贤
Ta:郭哲·郭哲
学生:李凯魏巍李凯|一天路一天|徐汇林旭辉|王红新洪欣|艾雨朱朱艾雨|胡子跃胡子跃|张子豪张子豪|开小小开|小亮英小亮|四姐高四姐|张丽华紧张|尤路尤|启新李李雨欣|黄子勋黄子勋
工作营介绍
随着工业机械臂和机器人在各个行业的广泛应用,以及无人飞行器、AGV等移动工具在现代自动化领域的突然出现,基于无人移动自建平台的现场施工技术已经成为数字化施工领域的一个重要研究方向。为此,本工作营试图建立一套适合移动机器人系统的设计-搭建工作流程,并探讨在空搭建的可能性。
01
研究背景
近年来,建筑师一直在探索数字技术在结构设计和装配中的应用,出现了许多关于非标准建筑设计和制造的研究。工业机器人在过去十年里发展迅速。然而,机械臂和计算机数控(CNC)机器受到预定工作区域的限制,这限制了它们可以操作的部件的尺寸,因此限制了它们的工作范围和整体结构。相比之下,无人机就不受这么窄的边界限制了。空的工作范围远大于飞机本身的尺寸,使得大型飞机可以以1:1的比例在整个结构施工中工作,从而为建筑师实现其设计提供了新的技术框架。

富,一个由Fab-Union团队近年建立的工程机器人工作平台

国际研究小组无人机辅助建设项目
1.飞行组装建筑
Gramazio &。科勒研究小组。动态系统和控制研究所
2.空中建筑
Gramazio &。科勒研究小组。动态系统和控制研究所
3.无人机协同构建
宾夕法尼亚大学库马尔实验室
4.作为无人机可配置建筑系统的网络物理宏观材料
斯图加特大学计算设计研究所
该作业营地是移动施工机器人空应用场景切换的扩展实验,提出了一种适用于快速灵活施工的施工形式原型。将该装置的规模扩大到真正的建筑规模后,可以采用标准预制构件的空方式建造真正生活规模的建筑,具有广泛的应用拓展性。
02
工作流建立
无人机系统的复杂性要求多终端、多传感器的协同工作。无人机在复杂施工环境和施工技术的前提下自主施工,也需要开发一体化的设计施工工作平台和工作流程。与数字化建设领域常用的基于犀牛和蚱蜢平台的参数化设计流程不同,这个工作营地中的工作流程将主体设计、机器人路径规划平台和机器人运动控制平台分开,引入了机器人研究领域常用的ros开源系统。实现Windows和Linux操作系统的连接,通过在不同软件平台上建立ROS模块和蚱蜢之间的通信和数据转换方法,构建适合移动机器人复杂场景的自建技术框架。

复合平台协同操作界面
一个完整的无人机自主构建系统由无人机空姿态反馈和地面站轨迹控制组成。

无人机自主构建系统框架
姿态控制部分采用无人控制领域非常成熟的开源飞控Px4固件。机载自动控制器硬件为Pixhawk V3,其中包括飞行控制所必需的传感器:姿态传感器(三向陀螺、加速度计)、磁力仪、气压计和空速度计。同时将无人机的坐标信息传回蚱蜢的ROS接口,用于地面站的可视化接口反馈。
地面站轨迹控制部分以ros系统为数据传输媒介,通过Mavlink轻量级通信协议中的ROS子节点,将犀牛建模软件中规划的构建路径和投放目标点的数据传输给自动控制器,从而完成无人机自动操作轨迹的虚拟控制。ROS系统加载在基于Linux操作系统的树莓Pi微机上,由无人机携带。
03
现场施工环境的建立
完整的工作环境包括一套红外光学运动捕捉系统、清洁无人机工作区、无人机起落架、进料口、充电器、安全网、手动控制安全员和地面计算机指挥站。

现场工作环境建设
考点选在建筑与城市规划学院C栋一楼展厅。展厅高2.5m,工作面积约5m*6m。八个红外运动捕捉相机用于形成定位系统。受实验场地和移动摄像机数量的限制,无人机实际工作面积为2.6m * 2.4m * 1.7m..八个摄像头均匀分布,悬挂在展厅天花板下方300cm的有限区域内。它们由CAT-6标准网络电缆供电并传输信号,它们都连接到中央交换机。

红外运动捕捉相机和悬挂固定模式

用于运动捕捉相机的识别和定位的反射标记球
红外运动捕捉相机以200hz的频率用特殊的反射标记球记录物体在空中的位置信息(红外光学运动捕捉技术是基于计算机图形学的原理。只要两个摄像头可以同时看到这个点,就可以确定这个点在三维空房间中的位置信息。当相机以足够高的速率连续拍摄时,可以从图像序列中获得该点的运动轨迹)。

施工环境中运动捕捉摄像机的布置
利用这一原理,通过监控和跟踪无人机上的特定光点来完成运动捕捉的任务。这些数据代表了无人机的六个自由度信息,包括三维之间的XYZ轴坐标空、偏航角偏航、滚转角滚转角和俯仰角俯仰。五个反光标记球附着在无人机机身顶部,它们的标记点对于不同的无人机有不同的位置。这个特征可以识别为施工过程中不同的刚体,区分了两个飞行器之间的信息传递。与实时捕获的无人机坐标信息不同,起落架和工作区原点的标定可以在实验前完成一次。
04
无人机装配及PID控制
工作营地使用的框架是以DJI F450框架为原型的自组装机身。它由四部分组成:机架、动力系统、控制系统和操作机械臂。

无人机装配结构分解图
电源系统采用kv650无刷电机,20A电动调节,由30c 5300mah 3s高速航模电池供电。在控制系统中,使用Pixhawk V3自动驾驶仪运行飞控程序,使用树莓Pi运行ROS主节点程序。ROS节点通过wifi接收动态捕获系统的定位数据包,并将处理后的数据包发送给不同话题的自动驾驶仪。Pixhawk和树莓Pi通过usb外部总线标准交换数据。


无人机组件
机械臂由LDX-335MG耐火舵机驱动,可从0°到45°开合,控制开合的信号由RC遥控器提供。



抓取机械手的设计
机载自动驾驶仪飞行控制程序中的位姿估计运算单元可以对运动捕捉系统反馈的数据和自身的传感器数据进行LPE(局部位置估计)计算,用于实时更新无人机相对于全球坐标系的位置估计,其方位信息也适当地集成到位姿估计器中。在实际构建之前,需要在已构建的实验环境中对加载无人机飞行控制动态运行模型的PID控制量的相对值进行微调,以适应不断变化的运行现场条件。

PID调节后速度和位置坐标值的估计
05
空之间的马赛克结构设计
综合考虑无人机的定位精度、悬停特性和工作环境限制后,野外圬工实验采用空空间镶嵌原理,将多个满足空镶嵌原理的离散多面体紧密堆叠后,即可形成空填充结构。在空之间可以实现镶嵌的多面体包括立方体(唯一的柏拉图多面体)、菱形十二面体、截顶八面体、三角形、四边形、六棱柱体。

一些可以在空之间实现镶嵌的多面体
A.立方体b .六棱柱c .菱形十二面体d .细长十二面体e .截顶八面体
经过多次小组讨论,选择满足空原则的菱形十二面体作为砌体立体几何。其优点在于其简单的几何特征,由12个全等的菱形组成,有24条边和14个顶点,为施工过程增加了定位冗余,这表明上下楼层在堆叠施工过程中会形成结构槽口,为后续砌体提供稳定的应力支撑。

金刚石正十二面体堆积示意图
整个结构由空之间的线和面的几何控制生成。空之间的镶嵌结构可以通过改变空之间的原始曲线或曲面的数学逻辑,灵活地拟合空之间的各种几何图形。


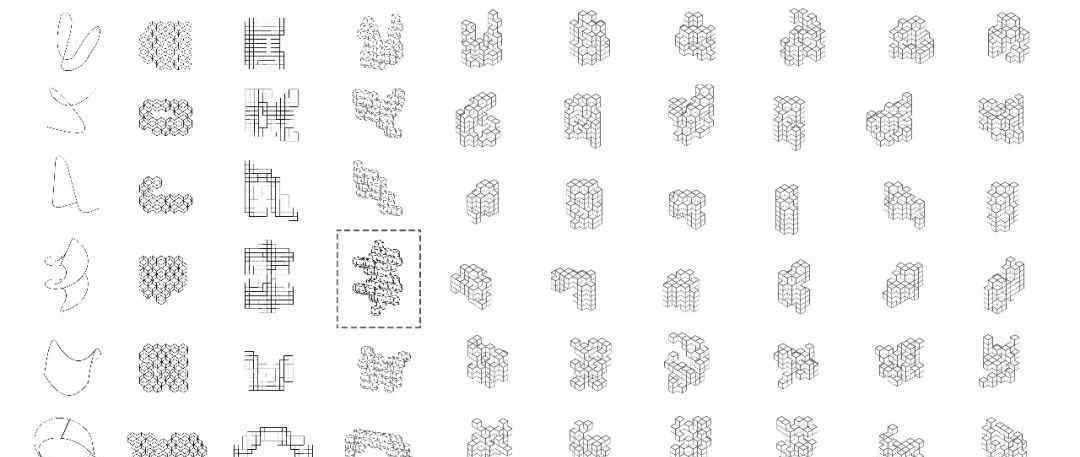
结构设计的选型
这种结构特点被证明非常适合无人机在空的运行特点,结构本身弥补了无人机受环境因素干扰的定位精度误差。在空之间进行三种曲线和三种曲面的形状拟合后,最终选择螺旋面作为参考面的结构形式,依次围绕中心轴堆叠交错,形成最终的器件形状。

06
分立元件设计
离散单元设计如下:几何平面展开后,用0.4毫米铝板激光切割,然后沿边缘弯曲,用直径15毫米、厚度4毫米的沉头磁铁和M3螺丝螺母固定成型。单元体之间的连接由双面上四个沉头磁铁的正极和负极连接。在下面的示意图中,定义了红色表面为正,蓝色表面为负。上、下两组的四个侧面安装有磁极相同的沉头磁铁。所有18块的磁极安装方式相同。




分立元件设计
无人机的机载区块会由于磁力的作用在目标点附近2厘米内自动完成快速定位。该节点的设计有效补偿了无人机室内定位精度的阈值问题。


此外,为了减轻块体的重量,保证结构底部的稳定性,表面设计了四种尺寸的菱形开口,从下到上依次增加。根据机械臂抓手结构的特点,在顶面开一个孔,设计成圆操作,辅助无人机完成稳定的抓取和释放。

机械臂夹紧操作示意图
07
无人机飞行路径规划
轨迹规划对于协调多架无人机执行砖石任务非常重要。本项目中使用的轨迹规划由三个不同的子系统组成。首先需要标定空与允许飞行安全区之间的布局,这个信息将成为影响结构建模和砌筑顺序的关键。其次,基于目标航路点,利用轨迹规划算法生成从初始起飞状态(由航向和位置给定)到静止(悬停状态)的可行轨迹,指挥无人机在多个航路点之间移动。最后,基于单机轨迹生成算法,将区块按顺序划分为若干无人机轨迹,区别在于出发点和返回路线。

犀牛蚱蜢的自动飞行命令可视化界面

路径规划和设计
无人机的构建轨迹是根据结构的形状规则自动生成的,分解成多个空坐标,在Rhino软件下的蚱蜢插件的可视化界面中进行计算。然后将这些目标点的坐标转换成无人机所在工作区域的全局坐标信息,通过运行在ros平台上的Mavros节点,通过Mavlink通信协议,将命令交给飞控程序中的定点操作模块。在这个过程中,空之间点的坐标转换成时间戳数组,包括xyz坐标和无人机偏航角(与无人机状态相关的三个轴角中只涉及偏航角的一个值)。
无人机(UAV)从着陆平台夹紧滑车后收到起飞指令,在空沿既定飞行路径到达目标落点的垂直空。之后保持平面xy值不变,改变z值,以三级减速完成下落过程,在目标点上方空150cm位置保持短暂悬停,执行放置动作,然后返回。

无人机着陆平台设计

路径规划的可视化界面
以上操作过程需要3分钟左右,完成两轮操作后需要更换电池以保证下一次飞行任务的稳定性。在铺设装置的过程中,为了保证动态捕捉数据的准确性和稳定性,无人机的飞行高度被限制在1.5m以内,并且距离主体结构至少30cm,以减少气动干扰和地面效应。

单机工作轨道循环

整体结构的砌筑顺序
08
协同建设战略
由于操作空的限制,如果两架飞机同时起飞,由于飞机桨叶和环境物体产生的上升气流的作用,会产生很强的气流干扰,造成无人机自稳定位调整过程中的误差积累,最终导致不稳定和坠毁的危险。

双机交替运行流程示意图
在尝试了不同的飞行策略后,为了保证施工过程的安全性和施工展示的完整性,最终采用了两台机器交替运行的方式。表现为其中一个完成铺放操作后返回起落架关闭动力系统,另一个同时启动飞行程序。这种交替协同构建策略可以保证一架无人机在更换电池的过程中另一架可以连续构建,也可以保证一架无人机在飞行过程中不受气流干扰。两架无人机进行了9次飞行更换,并在5小时的施工过程中更换了10次电池。

五小时施工过程
09
夏令营复工和研究展望
在前期研究建立的基于室内运动捕捉系统自建的无人机实时控制系统和可视化界面平台上,利用空的镶嵌原理,提出了适合无人机砌筑的整体结构形式和离散单元形式,完成了无人机自主完成的全部施工试验。

但本工程不保留实际建筑标准单元组合的结构原理,即这种方法不能一一适用于实际建筑。为了使空中的建筑在实际施工场景中获得成功,后续研究的方向将探索如何结合飞机空房间的灵活可达性,利用现有技术将建筑元素移动到难以到达的位置。在这项研究中,必须开发新的材料系统和施工技术,以解决无人机系统本身和环境干扰带来的限制,如有效降低载荷,同时提高整体结构强度,确保离散结构的定位精度。

通过与具有航空空、自动化、机械、CS等学术背景的团队成员合作。,我们更深刻的认识到,这项研究的成功,注定要打破建筑师固有的工作模式,需要与多个学科的专业研究团队不断紧密合作。

作者|郭伟,王翔
平面图|林旭辉、、黄伟、应、、陆游、、朱、、、胡、陆一天、张子豪
[工作营成就展示视频]
更精彩的展览细节
欢迎大家光临
时间:2019年7月6日~ 2019年10月14日
地点:建筑与城市规划学院C楼
数字期货上海2019
主机单元
同济大学
高校建筑学科国家指导委员会建筑数字技术教学委员会
爸爸
1.《assembled 无人机协同离散结构建造 | DigitalFUTURES 2019》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《assembled 无人机协同离散结构建造 | DigitalFUTURES 2019》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/tiyu/1077562.html