手是人体感知周围环境的重要感觉器官。它是我们大多数复杂运动行为的主要效应器器官,通过手势、接触、音乐和艺术来帮助表达情感。
在我国永久性性功能障碍的分类标准中,上肢功能占全身功能的60%,手指功能占上肢功能的90%。
上肢和手部功能障碍的常见原因包括中风、外伤、术后乳腺癌等。大部分都是中风。我国每年新增脑卒中患者250多万人,且发病率逐年上升,呈现年轻化趋势。55%-75%的幸存脑卒中患者会出现肢体功能障碍,其中手功能障碍约占80%。中风发病半年后,约65%的患者仍有上肢和手功能障碍,影响日常生活。手功能的恢复对患者的康复和日常生活至关重要。
手的解剖结构
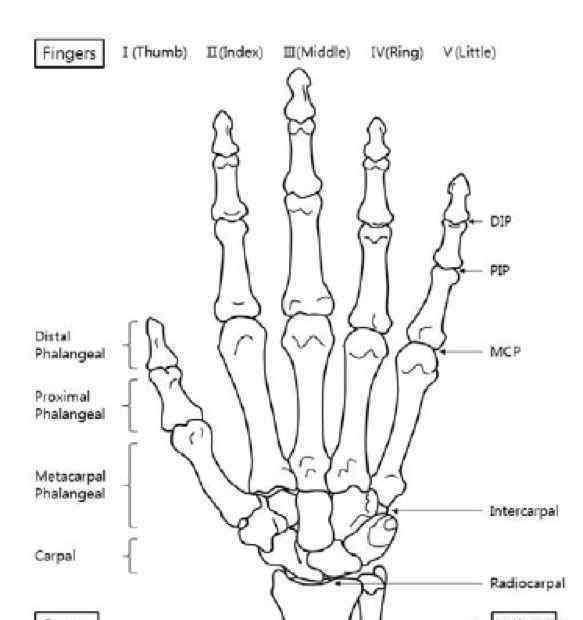
人手的骨骼结构主要由腕骨、掌骨和指骨组成。
指骨由近端指骨、中间指骨和远端指骨组成。
腕掌关节(CM)、掌指关节(MCP)、近端指间关节(PIP)和远端指间关节(DIP)形成于腕骨、掌骨和近端指骨之间。
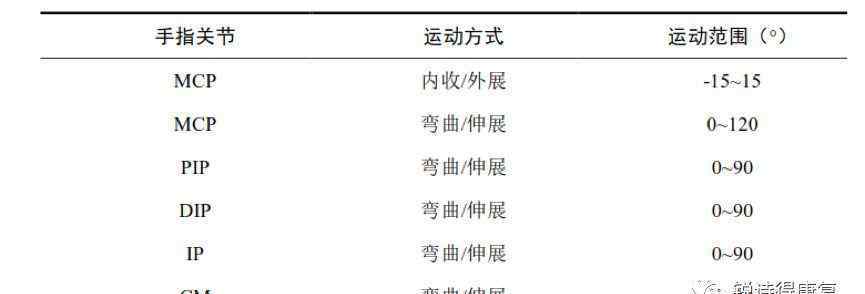
人手有21个自由度(DOF),前端有4个手指的每个手指有4个自由度,其中掌指关节(MCP)有两个旋转自由度,两个轴垂直相交。近端指间关节和远端指间关节各有一个自由度。除了一个自由度的指间关节(IP)和掌指关节外,腕掌关节(CM)还有三个自由度。人手关节的活动范围因人而异,有一个大概的范围。
0 1
拇指
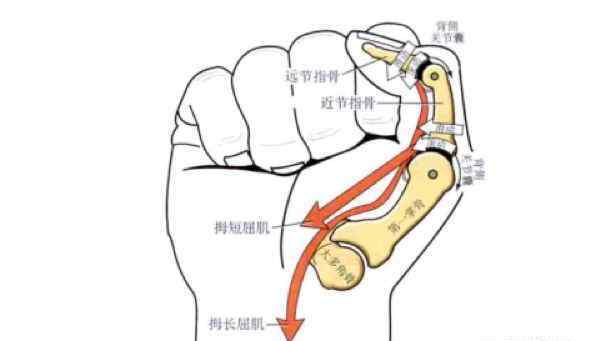
拇指有三个关节:第一腕掌关节、掌指关节和拇指之间的关节。屈曲、伸展、外展和内收是通过三个关节和韧带在相应肌肉的配合下完成的。下图,拇长屈肌和拇短屈肌相互作用形成拇指屈曲,箭头表示绷紧或拉伸的组织。拇指的功能很重要,手的功能需要拇指的配合。
0 2
剩下的四个手指
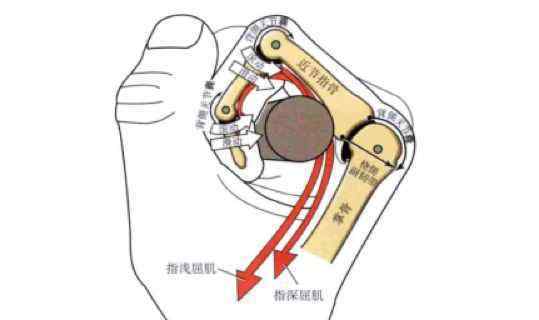
其余四指分别为掌指关节、近端指间关节和远端指间关节。屈、伸、外展、内收和少量旋转是通过三个关节和韧带在相应肌肉的配合下完成的。下图是指浅屈肌和深屈肌共同作用下,手指关节近端和远端指间关节的关节形状,箭头表示绷紧或拉伸的组织。四个手指有选择地与拇指配合,完成手的功能动作。
0 3
手掌弓
腕骨、掌骨和趾骨排列形成三个掌弓:近端横弓、远端横弓和纵向弓。
近端横弓位于手腕远端,由两排腕骨组成,结构稳定,活动度小。
远端横弓由第一、第二、第三、第四和第五掌骨形成,并穿过第一至第五掌骨。其中,第二、三掌骨相对固定,形成一个轴线,第一、四、五掌骨绕其旋转。
纵弓由中央腕骨、第二和第三掌骨以及食指和中指的指骨组成。纵弓近端通过腕掌关节(CMC)与腕骨牢固连接,是维持纵弓稳定的基础。纵向弓的远端非常灵活,允许每个手指主动弯曲约280°。
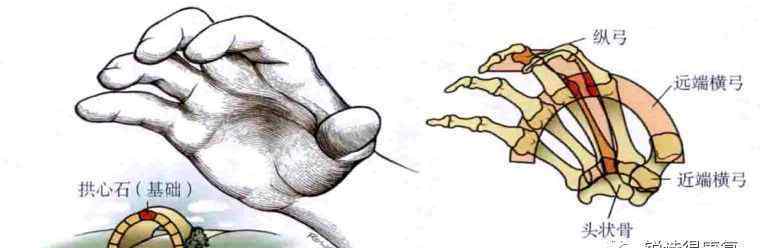
当手处于不同的姿势和位置时,手掌的横弓和纵弓会发生变化。随着弓角的变化,手可以握住不同大小和形状的物体。
正常的手部运动取决于手掌弓的完整性和灵活性。手的外部肌肉和内部肌肉分别负责手的力量和精细动作,两者的完全结合可以完成人手的各种复杂的功能动作。任何导致手掌弓破坏和手的内在或外在肌肉损伤或瘫痪的疾病或创伤都会对手的功能产生很大的影响。
手部功能模式

正常手指的运动具有以下特点:①各指关节的屈伸运动受生理结构限制在一定范围内(如MP关节的运动范围为0 ~ 90°;②四指拇指和指骨的运动限制在同一平面内;③四指PIP和DIP之间的运动有一定的约束关系。在没有外力的情况下,PIP扣的时候DIP会扣,反之亦然。
手的正常抓握功能取决于手骨和关节动力链的完整性、手内外肌肉的平衡以及手的正常感觉输入。手的功能模式简单分为抓握功能和非抓握功能。抓取功能可分为机械抓取和精确抓取两种。用力握力是拇指运动和无名指、小指在手尺侧受迫屈曲结合产生的动作;精确抓取是由手的桡侧部分产生的精细功能动作。Feix根据分类学的基本原理,将人手的抓取动作划分为33种更详细的抓取模式。
由于手部解剖精细复杂,手部受伤或偏瘫后手功能难以恢复,致残率高,严重影响患者的日常生活和工作能力。手的功能主要是通过手腕和手指灵活协调的运动来完成的。因此,尽快恢复手外伤或偏瘫患者的手部肌肉力量、关节活动范围、手指的协调性和灵活性尤为重要。
参考文献:
[1]Beebe JA,Lang CE。活动范围预测中风后3个月的上肢功能[J]。中风,2009,40(5):1772 —1779。
[2]多布金BH。临床实践。卒中后康复[J].临床医学,2005,352(16):1677-1684 .
[3]李伯,鲁恩松,埃纳尔松,等.由于肥大但受损的细胞外基质材料导致的痉挛性肌束力学性能较差[J].莫斯科,2003,28:464-471。
[4]Hwang CH,Son DS。个体手指同步机器人辅助手康复治疗亚急性至慢性脑卒中:一项前瞻性随机临床疗效试验Clin Rehabil,2012,26(8):696-704。
[5]Tadano K,Akai M,Kadota K .气动人工橡胶肌肉双关节机构握力放大手套的研制[[]。2010年机器人和自动化国际会议。
[6]马卡兰奥,迪特莫D,布查尔r。智能腕手矫形器(世卫组织)
四肢瘫痪患者[。初专干事修复术和矫形学杂志,1993年。
[7][.用于联合辅助和家庭康复的软机器人手套[[]。机器人学与自主系统,2015: 135-143。
1.《手掌骨骼结构图 手部解剖结构和基本功能模式》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《手掌骨骼结构图 手部解剖结构和基本功能模式》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/yule/785984.html