当我们建造一只机器人,并让它能顺利依我们的要求,完成该负责的工作:接收环境讯息、判断决策并做出相对应的动作,不算是一件容易的事。这需要高度整合各领域的技术,包括工程(机械、电子、电机、电脑、仿生)、理学(数学和物理)和艺术(美学)等等。如果更进一步思考机器人和人类和自然环境间的互动,那么连心理和社会科学等知识,也会被涵盖在这个范围内。

当然,在短短的一篇文章中,很难详细介绍全部的内容。因此,我们将由组装过程中会接触到的工程知识开始说起,这至少包含:机械、电子、电机、电脑和仿生各领域的知识。
1. 机械(机构组装)
机械领域包含范围很广,像是:外观设计、结构设计、3D绘图、零件制作、手工具的使用等等,都可以归类在这个范围内。其中「机构组装」通常是我们在学习机器人时,最早期会接触到的领域。
以组装DIY套件为例,使用者首先面临的挑战就是机构的组装。多自由度的机器人使用的零件配件可能非常多,再加上常会遇到结构件的尺寸或对位不一定精准的状况,可能出现干涉或是尺寸有些微差异等问题。
因此我们会需要使用手工具和简易的工具机加工,来修正这些零组件。而在安装过程中,我们也常常需要对配件的位置做微调,甚至重新安排配重。当然像是锁螺丝、去毛边、扩孔等等的动作,更是必备的基本技能。

2. 电机(电机控制)
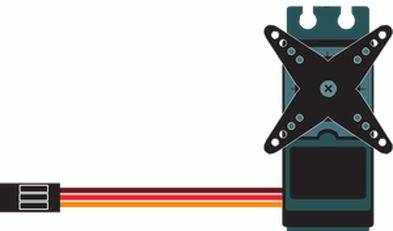
电机控制在机器人的学习中,也扮演着重要的角色,其中包含了机器人的电力系统和制动器(伺服机/马达等)。
「制动器」学术一点的定义是将能量(一般而言,在机器人中大多使用电能)转换成物理运动的装置。讲白话文,就是可以让机器人动起来的装置,像是马达或伺服机。因为机器人往往需要执行各式各样的动作,因此,要为机器人选择正确的制动器,除了需了解坊间有那些装置可应用之外,还需要机器人设计师加入一些想象力,以及一些数学和物理的知识。
另外一个和电机控制相关的重要部分就是电力系统。像是怎么供电?需要多少时间充电?使用的电压电流是多少?以及电池的各种形式等知识,都会在组装过程中持续学习、累积。
3. 电子(电路串接)
当我们组装好机器人的结构和制动器之后,接下来就进入处理电子相关问题的阶段。
在决定选用哪一张微控制板、马达控制板和合适的感知器后,电子相关的问题马上接踵而来,例如:电路板设计与测试方法?电压电流?什么是接脚?接脚功用是什么?各式配件要接哪几只脚?怎么选择微处理器?所标注的规格是什么意思?什么是高电压/低电压?类比及数位及相互转换?通讯协议又是什么?什么是UART?SPI?I2C?如果不是电子背景的玩家,在这个阶段很可能会被这些问题搞得头昏脑胀。

4. 电脑(编程开发)
微控制板很多时候可被视为一台小电脑。机器人所经历的感知、判断和执行三大步骤,这样的架构本身就是电脑技术的延伸。其中用来控制机器人的程式码,更被视为机器人的灵魂。程式编写通常是制作机器人的最后一个步骤,然而若少了这个步骤,机器人将只会是一个精致而昂贵的模型。
目前坊间有许多程序语言,可用于微控制器的程序编写,像是:组合语言、C/C++、JAVA、Python和Processing(Arduino)等等。在选择微控制器时,一定要特别注意它使用的语言;错误的选择很可能会影响未来机器的程式开发过程的痛苦指数,以及其相容和扩充性。
另一方面,就是要特别注意微控制板商所提供的人机编辑界面,因为好的界面可以节省玩家非常可观的学习和开发时间。

5. 仿生(仿生运动)
仿生学(Bionics)这个名词来源于希腊文「Bio」,意思是「生命」,字尾「nic」有「具有……的性质」的意思。仿生学主要是观察、研究和模拟自然界生物各种特殊本领的一门科学,它着重于了解生物的结构和功能原理,并利用这些原理,来研制新的机械和技术,或解决机械技术的难题。
仿生学在机器人中,最常被应用的就是让机器人移动的方法。为了让机器人执行任务,「如何让机器人本体移动」是一个非常重要的课题。这样的需求,除了采用机械移动方式,像是轮子或是履带之外,另一个普遍应用的方法,就是师法地球上各类可以自由移动生物的移动方式。

在自然界中,常见的生物的移动方式,至少包含下列数种:双足移动(例如:人类、企鹅)、四肢移动(狗、豹)、六足移动(昆虫)、八足移动(蜘蛛)、腹足移动(蛇)、跳耀移动(袋鼠、跳蚤)、飞行(鸟类、昆虫)、水中移动(鱼类、有蹼动物)等等。而最让人兴
1.《由组装机器人的整个过程来演示:机器人课程到底可以学到什么?》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《由组装机器人的整个过程来演示:机器人课程到底可以学到什么?》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/tiyu/27319.html