当然,我们必须找到正确的方向去做正确的事情。中国k联盟聚集了3万名一线技术人员。
关注我们,和自动化技术人员交朋友
什么是工业机器人TCP?
什么是工业机器人TCP?
为了描述空之间的刚体的姿态,需要在物体上固定一个坐标系,然后确定坐标系的姿态(三个坐标轴的原点位置和姿态),即需要六个自由度才能完整描述刚体的姿态。对于工业机器人,需要在端板上安装一个工具进行操作。为了确定刀具的姿态,刀具坐标系(TCS)被绑定到刀具,并且TCS的原点是TCP(刀具中心点)。机器人轨迹编程时,需要记录TCS在其他坐标系中的位姿,并在程序中执行。TCP的类型有:常规TCP、固定TCP、动态TCP。
01.传统传输控制协议:随机器人身体移动
一般来说,工业机器人的TCS是预先定义的。TCS的XY平面绑定到机器人第六轴的法兰平面,原点与法兰中心重合。虽然可以直接使用默认的TCP,但是在实际使用中,比如焊接,用户通常定义TCP指向焊丝的尖端(实际上是tool0坐标系中焊枪工具坐标系的位置和姿态),所以程序中记录的位置就是焊丝尖端的位置,记录的姿态就是焊枪绕焊丝尖端旋转的姿态。
02.固定传输控制协议
TCP定义为机器人体外的静态位置。常用于涂胶,胶槽的喷嘴静止,机器人抓取工件移动。其本质是一个工件坐标。
02.动态TCP
对于更复杂的应用,TCP可以扩展到机器人本体轴(外轴)的外部,用于TCP需要相对于法兰进行动态变化的情况。
随着工业的发展,工业自动化技术逐渐成熟。越来越多的高精度、高复杂度的制造行业对生产精度提出了更高的要求,极大地推动了机器人在工业生产中的应用。
TCP精度测试原因
随着全球工业自动化生产的不断升级,工业机器人作为实现生产自动化的主要手段之一,已经广泛应用于工业生产中,不仅用于搬运、喷漆、焊接等操作,还用于自动装配、尺寸检测等超精密操作。目前机器人厂商生产的机器人重复定位精度高,但绝对定位精度很低,只有毫米级,不能满足高精度加工的要求。
TCP精度测试的分析基础
机器人加工装配过程中不可避免地会出现误差,机器人操作过程中的磨损也会造成运动副之间的间隙。而且实际的部件都是弹性的,在高速运动时,在惯性力、重力、外力的作用下,必然会出现弹性变形、振动等问题。工业机器人受运动学模型控制(如图1),运动学模型引起的结构参数是设计值,不可避免地与实际结构参数有误差,导致机器人无法严格按照预期的姿态要求运动,往往很难直接测量这些结构参数。
但是这些结构参数误差必须以一定的形式体现出来,最直接的体现就是末端执行器的TCP精度。通过测试机器人末端执行器的TCP精度,可以推导出机器人的误差源,然后通过离线软件仿真,可以清楚地发现误差对机器人末端执行器的影响(如图2所示)。通过离线仿真分析,合理分配和控制各种影响因素,可以达到提高机器人末端执行器操作精度的目的。

图1运动学模型
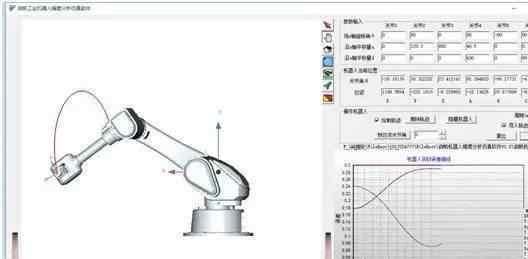
图2模拟分析
TCP精度的检测
根据对机器人误差源的分析,如何检测和获取有效的处理数据是TCP精度测试过程中的重要环节,而工业机器人精度的测量是提高TCP精度的一个极其重要的因素,即结构参数的识别精度。任何测量过程都包括四个要求:测量对象、测量单位、测量方法和测量精度。为了准确可靠地测量,需要综合分析和正确选择这四个要素。因此,制定正确的检测方案是关键,影响整个TCP精度测试的分析:
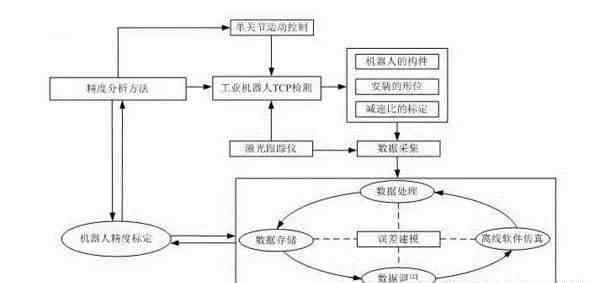
图3精度检测校准方案
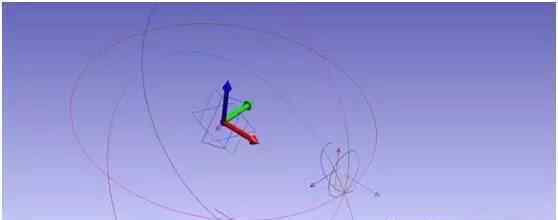
图4激光跟踪器之间的检测空
激光跟踪仪具有高分辨率、大工作空和非接触测量的优点。同时,使用激光跟踪器校准机器人不再需要其他测量工具,节省了测量工具的繁琐校准。根据激光跟踪器获得的数据(如图4所示),通过处理可以获得机器人的连杆参数、减速比、形状和位置结构,然后根据软件程序对TCP检测测试的数据进行分析处理(如图5所示)。

图5软件程序数据处理
TCP准确性测试结果
从机器人自身的运动约束出发,识别并构建机器人运动学模型坐标系。通过位姿测量,将机器人末端的实际位姿与名义位姿之差作为参数辨识程序的输入,根据建立的静态位姿误差模型计算机器人运动学参数的误差。然后,对机器人控制程序中的运动学参数进行修改,得到末端位姿和关节变量之间的精确变换,提高机器人的TCP精度。
为了测试TCP精度提高的效果,在空之间的不同位置卸下校准棒。通过在空之间改变不同固定点的姿态,观察末端执行器的相对固定点偏移,作为评价机器人末端执行器TCP精度的依据。测试结果如下。由此可见,起航机器人的TCP精度测试效果无疑完全符合要求!
中国k联盟:从东北出发,我们是一直坚守东北这块土地的技术人员的平台。
关注我微信号:chinak958888(←长按复制)更多信息,请关注微信号中国. k中国控制联盟,汇聚中国制造2025技术人员联盟
欢迎来到黑龙江自动化培训中心
自动化培训的国家领导者
中心优秀实践就业培训班(推荐关注)
1.电气自动化工程师的就业培训
2.国家电网考试培训
3.中科院大数据APP就业培训
4.注册自动化系统工程师认证培训
5.注册电气工程师认证培训
6、维修电工实用技能上岗培训
1.《tcp是什么 什么是工业机器人TCP?》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《tcp是什么 什么是工业机器人TCP?》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/fangchan/861124.html








