欢迎传感器制造商与我们联系。这既是一个评价平台,也是一个宣传平台。希望大家可以通过泡泡机器人的“传感器评测”栏目发布给合适的目标用户。同时也希望能在评估过程中为传感器提供有用的意见和建议,帮助传感器做得更好。
我们可以评估所有SLAM相关设备,包括但不限于单眼和双目相机、RGBD相机、激光雷达、运动底盘、计算平台、imu传感器等。
泡泡机器人——传感器评测专栏,希望搭建SLAM传感器的桥梁,为SLAM技术的演进起到一点点推动作用。
评估人:周平黄百川
欢迎个人转发朋友圈;如果其他机构或自媒体需要转载,在后台留言申请授权
Realsense的纵向比较
1.2相机自标定结果:重投影误差小于1像素;
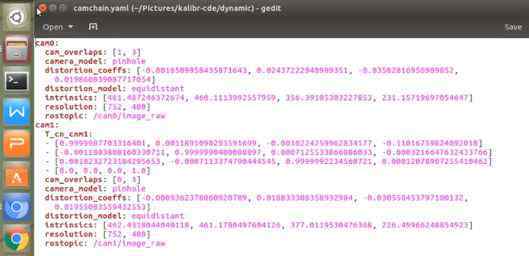
1.3相机和imu外部校准:重投影误差在一个像素以内
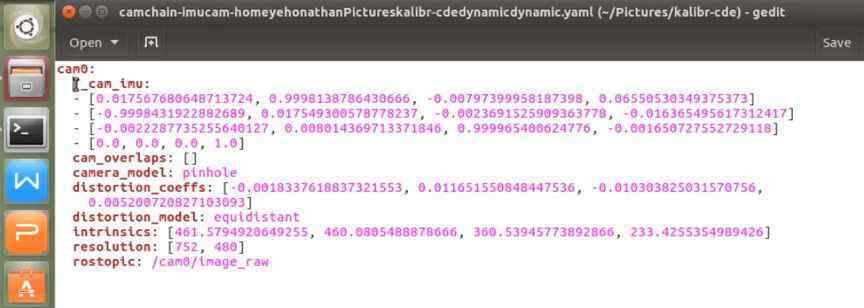
这里对校准细节不做过多描述。详见《小美评价》第一、中、二部分。
2三维重建
2.1环境建设
(a)显卡(nvidia geforce 1060)驱动程序
(b)CUDA9.0
弹性融合
D435
请参见详细的配置过程:
https://zhuanlan.zhihu.com/p/68985304
2.2注意事项
(a)如果采用tum数据集,数据集的硬条件为:16位深度图和24位rgb图,分辨率均为640x480,associations.txt位深度第一,rgb第二。
(b)我们需要在findopenni2.cmake文档中手动添加我们的openni2的路径。
(c)由于官方弹力带只支持librelease sense(SDK)1.0版,而现在买的d435或d435i相机只支持librelease NSE 2.0(SDK 2.0),官方库不修改代码无法支持d435实时三维重建。
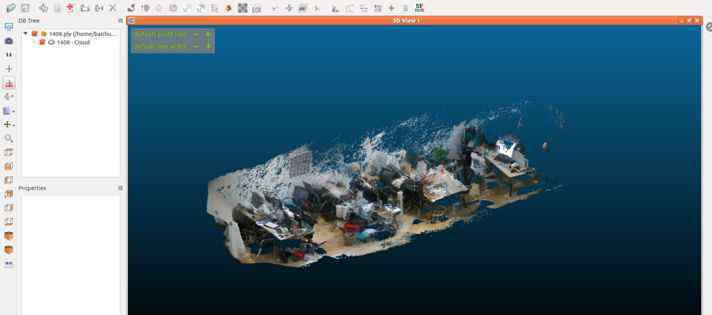
2.3实时显示
实时三维重建、支撑环和复位
2.4总结
1.输出点云稀疏,但在数据处理过程中可以显示纹理等详细信息;
2.可输入传感器内部参考数据;
3.循环检测和重定位功能可以在实时过程中打开;
4.在采集数据的过程中,速度要尽量慢,最好在初始时刻停留一段时间,类似于初始化的过程,这样效果才会好。
参考资料和链接
[1]https://arxiv . org/ABS/1909.05214
[2]https://zhuan LAN . zhi Hu . com/p/66939776
[3]https://zhuan LAN . zhi Hu . com/p/68985304
[4]https://github . com/ethz-ASL/kali br
[5]https://github . com/ethz-ASL/kali br/wiki/downloads
[6]https://pan . Baidu . com/s/1m UC 0 GL 4 ntwbjznsdzum-Fq
如果你对这篇文章感兴趣,想下载整篇文章阅读,可以关注【泡泡泡泡机器人_slam】微信官方账号。
泡沫论坛:http://paopaorobot.org/forums/
泡泡机器人SLAM的原创内容是泡泡机器人的成员花了很大力气做出来的。希望大家珍惜我们的劳动成果。请注明来源于【泡泡机器人SLAM】微信微信官方账号,否则追究侵权!同时,我们也欢迎大家转载到自己的朋友圈,让更多的人进入SLAM领域,让我们一起为推动SLAM在中国的事业而努力!
如需业务合作和转载,请联系liufuqiang_robot@hotmail.com
1.《realsense 【泡泡传感器测评】Realsense D435测评》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《realsense 【泡泡传感器测评】Realsense D435测评》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/guonei/760679.html


