机器之心编辑部
机器人领域顶级会议 ICRA 2020 于近日召开,并公布了会议奖项。其中华人小哥 Shenli Yuan 等的研究《Design of a Roller-Based Dexterous Hand for Object Grasping and Within-Hand Manipulation》获得了此次会议的最佳学生论文奖和最佳机器人控制论文奖。


入围 ICRA 2020 四个奖项的研究讲了些什么?
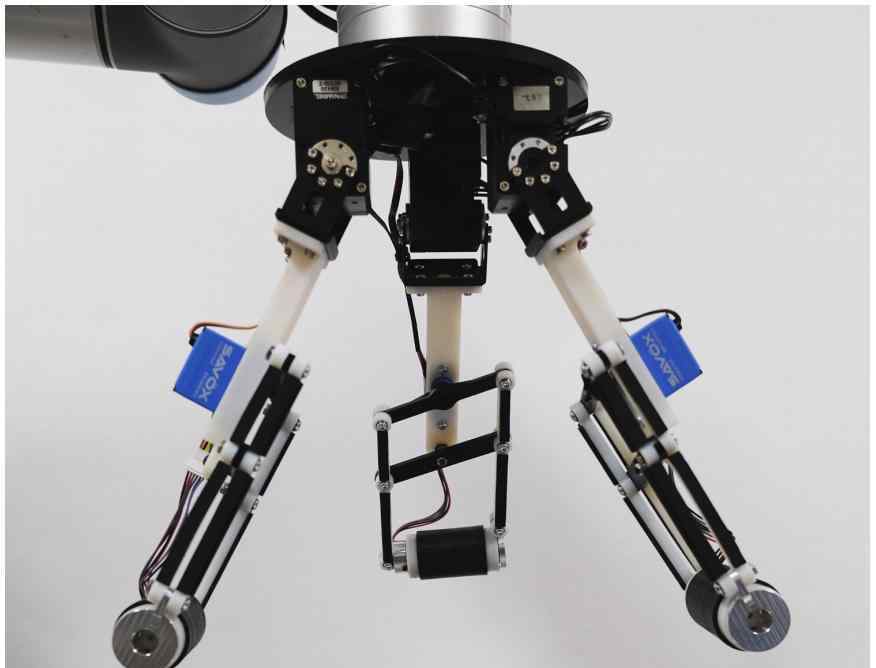
这项研究开发了一种新型非拟人化机械手,可以通过安装在机器人指尖的铰接式滚筒来操纵物体。

我们先来看这只机械手操纵物体的能力。
一只小小的骰子,它转起来毫不费力!


机械手的设计原理
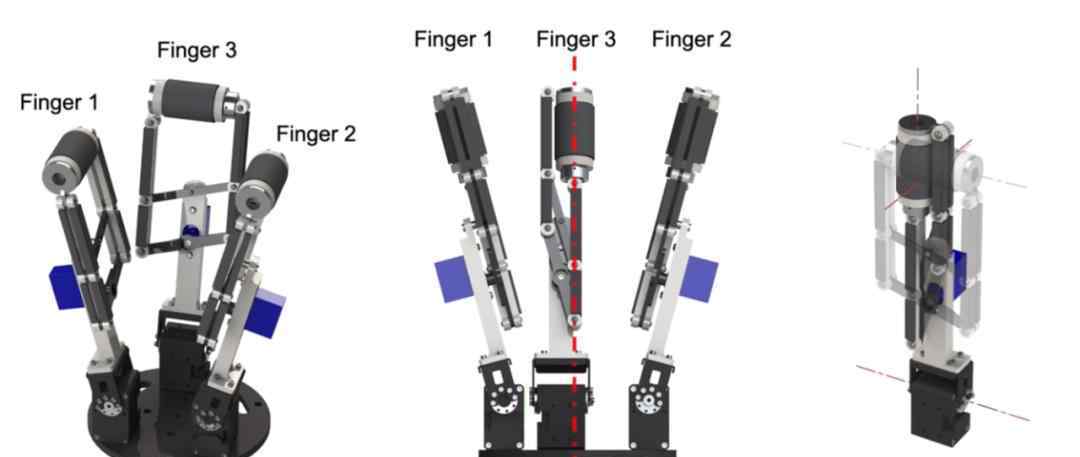
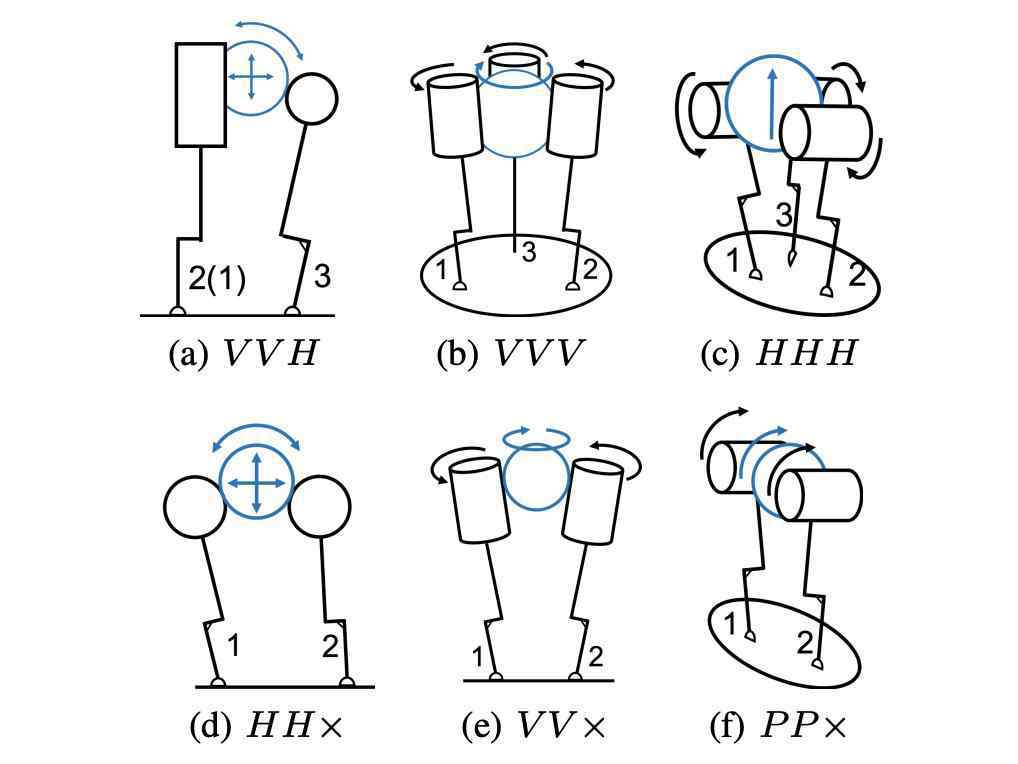
这只机械手的抓手包含三个运动学类似的手指,每个手指有三个自由度,参见下图:
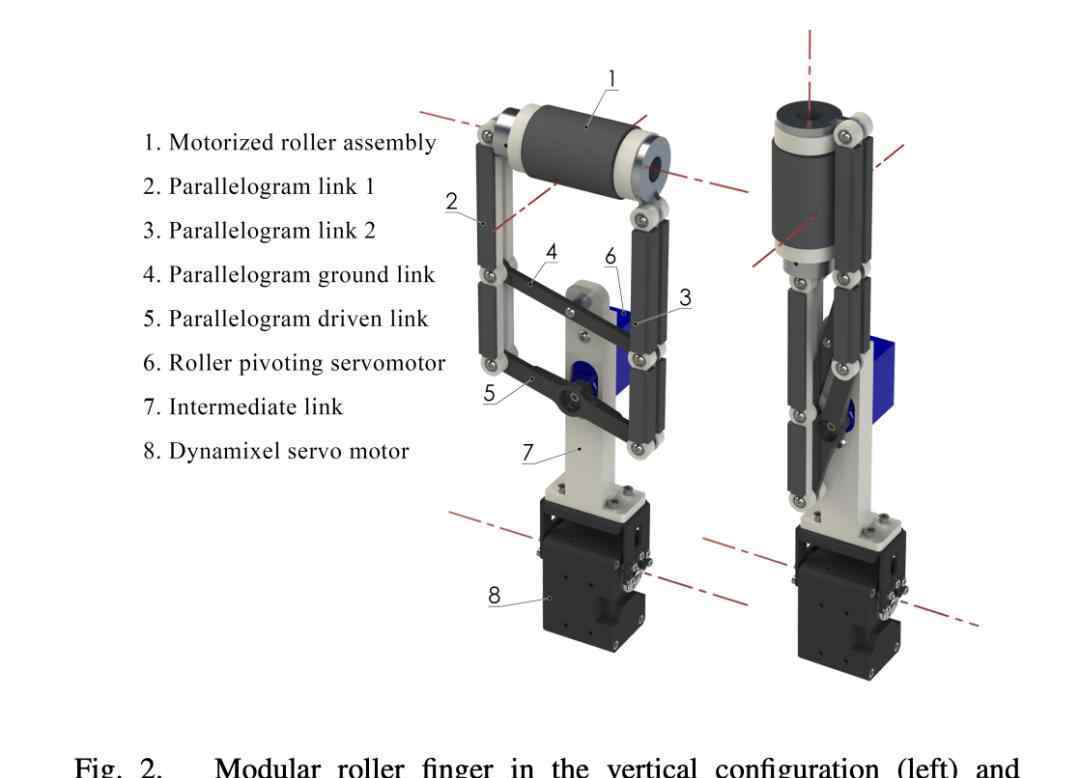
中间自由度正交于近端 DoF,它基于《Remote center-of-motion robot for surgery》中的平行四边形机制,其输入连杆和接地连杆位于平行四边形的中线。中间自由度控制指尖滚筒的方向,由微数字伺服电机来驱动。
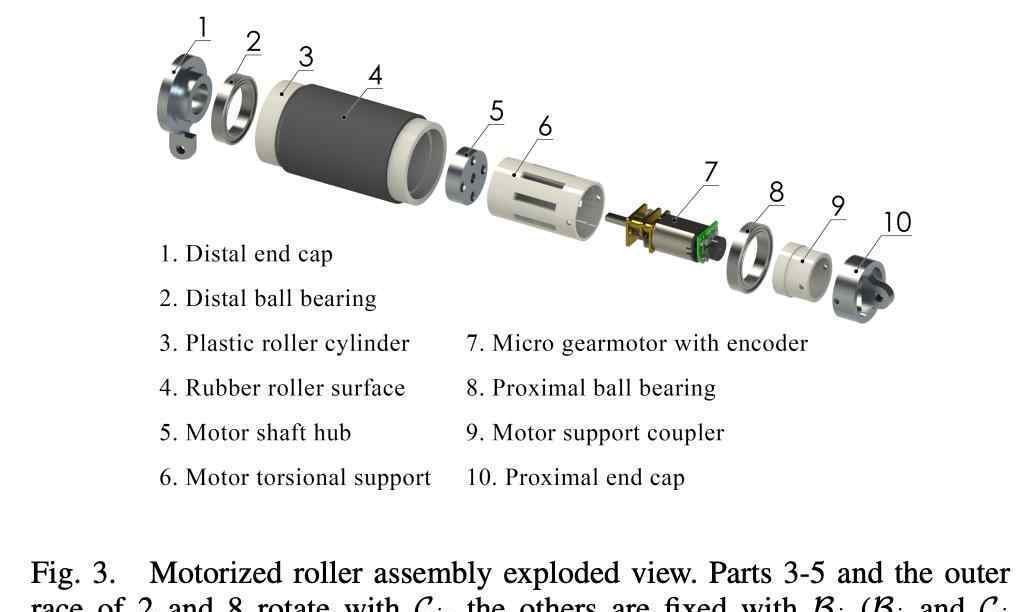
指尖滚筒由配备正交编码器的微 DC 齿轮马达驱动,能够实现连续旋转。该滚筒安装有多个氯丁橡胶 O 型环,可以为抓握和操纵物体提供高阻力表面。
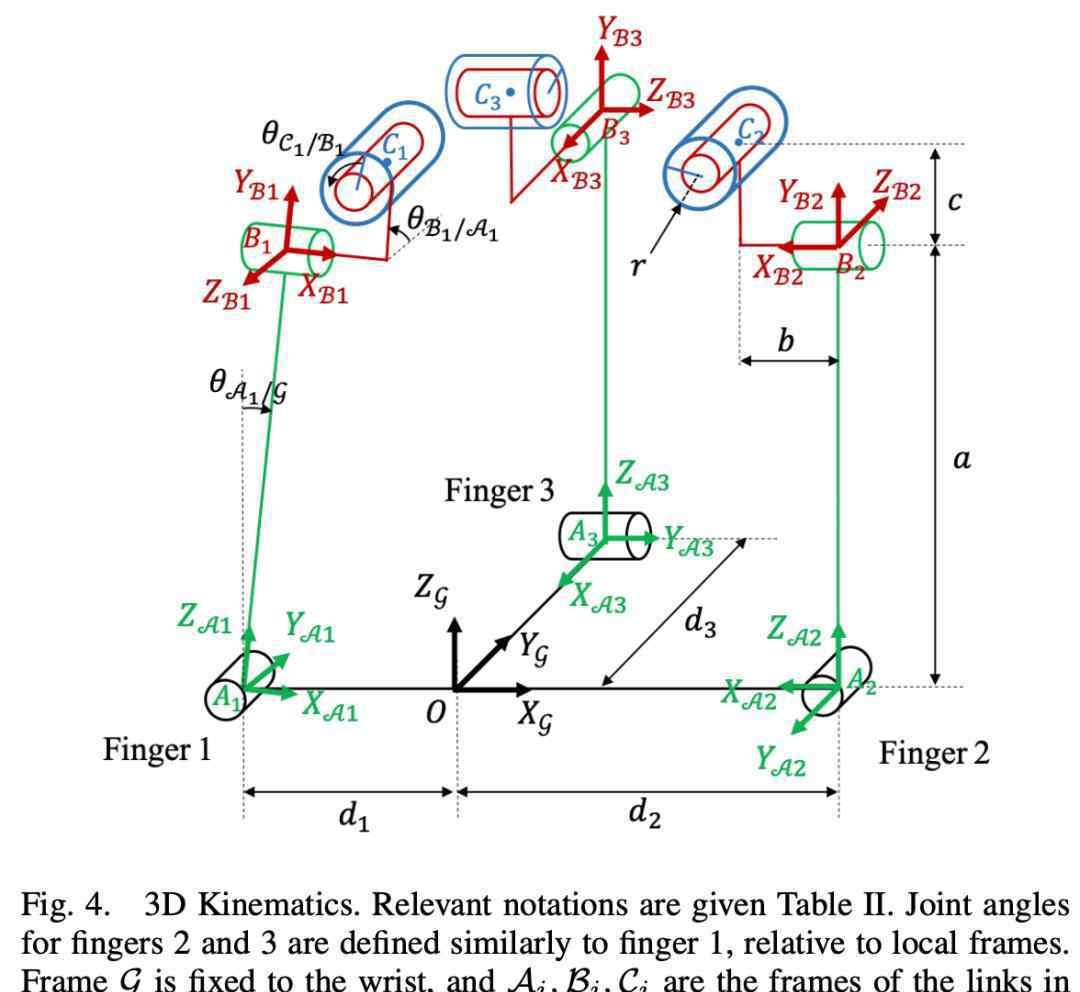
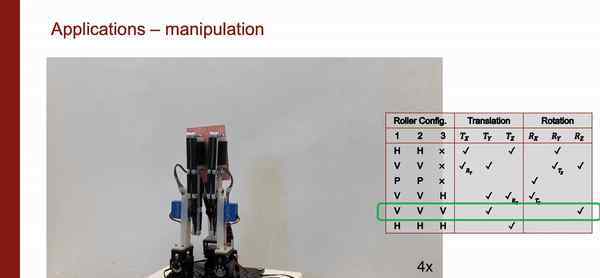
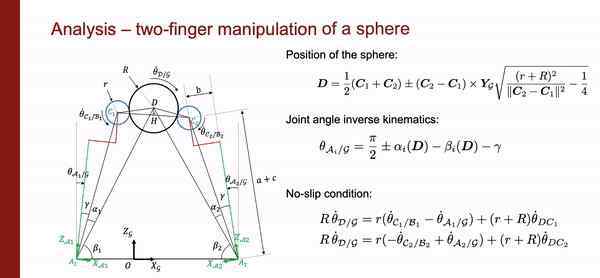
此外,该研究对其进行了运动学分析,将机械手用二指和三指控球的方程进行了形式化,以展示机械手的六自由度非约束空间移动能力。
下图展示了滚筒在操纵球体时的配置:

关于该研究的更多信息,参见:https://ras.papercept.net/proceedings/ICRA20/1733.pdf
此外,作者还给出了论文解读视频,感兴趣的读者请戳:

这项研究的第一作者是 Shenli Yuan,他在本科阶段获得了上海交通大学和普渡大学的双学士学位,硕士阶段又取得了斯坦福大学音乐与科学技术硕士和机械工程理学硕士。

Shenli Yuan 现为斯坦福大学机械工程博士生,同时辅修计算机科学,其导师为斯坦福人工智能实验室的 Kenneth Salisbury 教授。
他对机器人学、触觉学和音频技术都有很大的研究兴趣,大多数科研项目与这些主题相关。最近,他将研究重点放在了机器人手内操纵领域,尤其是设计机器人抓手和开发操纵算法。
除了这篇获奖研究之外,Shenli Yuan 之前参与的一些研究工作也被其他学术会议或期刊接收:

ICRA 2020 其他奖项
除了 Shenli Yuan 获得的最佳学生论文与机器人操控最佳论文奖,大会还公布了大会整体最佳论文、自动化最佳论文等众多奖项。
其他获奖论文信息整理如下:
自动化最佳论文:Securing Industrial Operators with Collaborative Robots: Simulation and Experimental Validation for a Carpentry task
链接:https://hal.inria.fr/hal-02418739v2/document
认知机器人最佳论文:Semantic Linking Maps for Active Visual Object Search
链接:https://7948cefb-1ef7-4c55-96df-fcb8d527c697.filesusr.com/ugd/0886ee_198d7d01f879448bbf00733b21bfcbe9.pdf
机制与设计最佳论文:Swing-Assist for Enhancing Stair Ambulation in a Primarily-Passive Knee Prosthesis
链接:https://icra20.slack.com/?redir=%2Fapp_redirect%3Fchannel%3Dmoa01_1#/
医疗机器人最佳论文:Fault Tolerant Control in Shape-Changing Internal Robots
链接:http://eprints.whiterose.ac.uk/160367/
机器人视觉最佳论文:Graduated Non-Convexity for Robust Spatial Perception: From Non-Minimal Solvers to Global Outlier Rejection
链接:https://arxiv.org/abs/1909.08605
无人机最佳论文:Design and Autonomous Stabilization of a Ballistically Launched Multirotor
链接:https://arxiv.org/abs/1911.10269
人机交互最佳论文:Preference-Based Learning for Exoskeleton Gait Optimization
链接:https://arxiv.org/abs/1909.12316
世界人工智能大会线上活动是由上海市政府打造的国际顶级人工智能会议。为进一步促进人工智能技术与产业相融合,推动开发者技术生态建设,WAIC 2020年黑客马拉松将于7月9日-11日期间举办。
机器之心联合优必选科技与软银机器人公布两大赛题,邀请全球开发者来战。更多精彩赛题将于近期公布,欢迎关注。
1.《斯坦福电球 上交大本科毕业,这个小哥的机械手玩球技术娴熟》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《斯坦福电球 上交大本科毕业,这个小哥的机械手玩球技术娴熟》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/guonei/401745.html