标题:深度时间示例:3D激光雷达扫描的时间一致性语义分割
编者:黄
欢迎个人转发朋友圈;如果其他机构或自媒体需要转载,在后台留言申请授权
抽象的
大家好,今天的文章是——Deeptemporalseg:3D lidar扫描的时态一致语义分割,目前发表在arXiv。
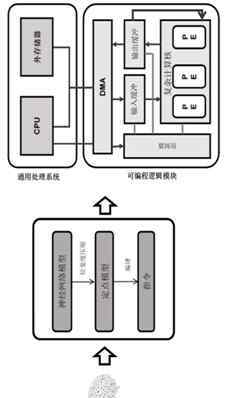
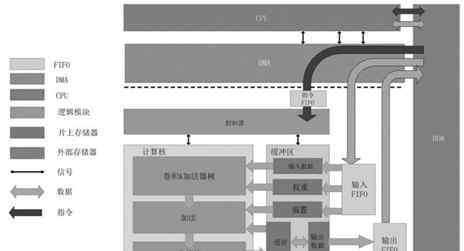
理解环境的语义特征是机器人自主操作的关键。在本文中,作者提出了一种深度卷积神经网络(DCNN)来将激光雷达扫描数据语义分割成汽车、行人或骑自行车的人。该架构基于密集块,有效利用深度可分卷积限制参数数量,同时仍保持最先进的性能。为了使离散余弦神经网络的预测在时间上保持一致,作者提出了一种基于贝叶斯滤波的方法。该方法利用神经网络的预测输出递归估计扫描数据中点的当前语义状态。递归估计使用从以前的扫描中获得的知识,因此预测在时间上是一致的,并且对孤立的错误预测是鲁棒的。作者将所提出的体系结构的性能与其他最先进的神经网络体系结构进行了比较,并提出了实质性的改进。对于提出的贝叶斯滤波方法,作者给出了KITTI跟踪基准测试中各种序列的结果。
1.提出了一种用于三维激光雷达语义分割的卷积神经网络结构。细分类别是汽车、人和骑自行车的人。
2.提出了一种贝叶斯滤波方法,使神经网络的预测具有时间一致性。
同样的原因是:
引入对数概率l = log(p/(1-p)),将公式(3)除以公式(4)即可得到各点属于语义类别c的概率:
其中P(O | ξ) = ξ,l0为初始值。通过该公式,本文提出的算法的预测输出不仅与当前神经网络输出有关,还与前一时刻的网络输出有关。为了获得迭代项,需要两个帧之间的数据关联。作者估计帧之间的相对运动,然后使用最近邻相关来获得两帧的对应点。
表2本文算法与其他神经网络的比较。
评价指标为各类IoU和平均IoU

表3消融研究结果。
作者比较了不同的网络和不同的下采样策略。
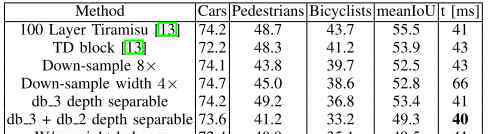
表4在不同序列的KITTI数据集上测试贝叶斯滤波器对神经网络分割性能的改善,IoU提高4% ~ 9%。
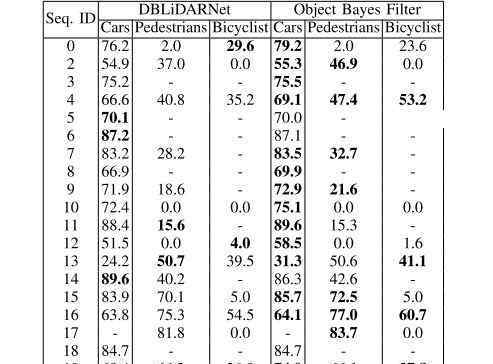
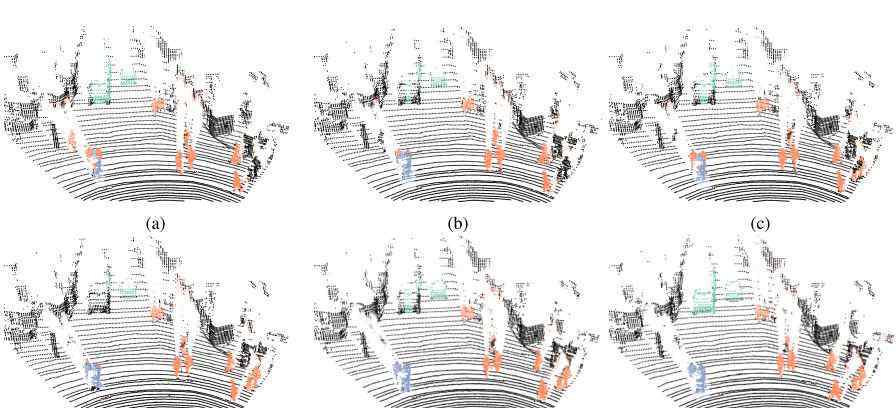
图2显示了更多的分割结果
摘要
理解环境的语义特征是机器人自主操作的关键。在本文中,我们提出了一种深度卷积神经网络(DCNN),用于将激光雷达扫描的语义分割成汽车、行人或自行车等类别。这种体系结构基于密集块,并有效地利用深度可分离卷积来限制参数的数量,同时仍然保持最先进的性能。为了使离散余弦神经网络的预测在时间上一致,我们提出了一种基于贝叶斯滤波的方法。该方法使用神经网络的预测来递归地估计扫描中一个点的当前语义状态。这种递归估计使用从以前的扫描中获得的知识,从而使预测在时间上一致,并且对孤立的错误预测是鲁棒的。我们将我们提出的arc体系结构的性能与其他最先进的神经网络体系结构进行了比较,并报告了显著的改进。对于所提出的贝叶斯滤波方法,我们在KITTI跟踪基准中显示了不同序列的结果。
泡泡机器人SLAM的原创内容是泡泡机器人的成员花了很大力气做出来的。希望大家珍惜我们的劳动成果。请注明来源于【泡泡机器人SLAM】微信微信官方账号,否则追究侵权!同时,我们也欢迎大家转载到自己的朋友圈,让更多的人进入SLAM领域,让我们一起为推动SLAM在中国的事业而努力!
如需业务合作和转载,请联系liufuqiang_robot@hotmail.com
1.《temporal 【泡泡图灵智库】DeepTemporalSeg:具有时间一致性的3D激光雷达语义分割》援引自互联网,旨在传递更多网络信息知识,仅代表作者本人观点,与本网站无关,侵删请联系页脚下方联系方式。
2.《temporal 【泡泡图灵智库】DeepTemporalSeg:具有时间一致性的3D激光雷达语义分割》仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.文章转载时请保留本站内容来源地址,https://www.lu-xu.com/junshi/1160091.html